中國團隊研發仿人手指 可抓取超薄或超脆物體
【中新社武漢十一月十七日電】(馬芙蓉孫彥欽)記者十七日從中國地質大學(武漢)獲悉,該校科研團隊研發出一款仿人手指,適用於抓取超薄或超脆物體,為機器人在食品處理、醫療護理、智能服務等高敏場景中的精細化應用開闢了新的可能。
相關研究成果於近日發表於《自然.通訊》(Nature Communications)。
讓手指既「有力」又「溫柔」,是機器人應用面臨的一大挑戰。為破解此難題,中國地質大學(武漢)自動化學院智能機器人系統實驗室教授賴旭芝帶領的團隊,受人類手指剛柔並濟結構啟發,設計出一款剛-柔-軟結構仿人手指。
據賴旭芝介紹,該仿人手指由剛性管狀骨骼、柔性關節彈簧、氣動薄膜驅動器和軟體矽膠皮膚組成。這種結構確保了仿人手指的高承載能力和穩定性,同時使其具有類似人手的柔順輸出力。
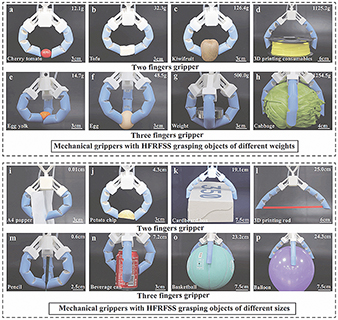
從約十二克的小番茄到約一千克的3D打印耗材,從雞蛋到捲心菜,從A4紙到氣球,從三指抓取到雙指抓取……研究團隊通過大量實驗,驗證了裝有該仿人手指的抓持器在不同質量、硬度、尺寸和形狀情形下,具有良好抓取能力。
其中,在抓取豆腐實驗中,抓持器將豆腐從平台上拾起,再準確放回,連續重複二十次均未造成任何破損或碎裂;在抓取薯片實驗中,抓持器從水平、傾斜、垂直等角度,均能通過自適應變形有效貼合薯片曲面,實現多次無損抓取與放置。
「隨著人形機器人逐步走向生活,其末端執行器性能正成為決定其『類人能力』的關鍵。」研究團隊成員、中國地質大學(武漢)自動化學院教授孟慶鑫表示,剛-柔-軟結構仿人手指結構簡潔、成本低廉,可以裝置到任何人形機器人上,為人形機器人實用化、高端化發展提供關鍵支撐。◇








